Road safety managers and traffic operations typically represent two distinct but complementary disciplines of practice, with the predominant ‘divide’ reflected by a focus on mitigation of crashes and congestion among these disciplines respectively. Traffic operators are focussed on delivering efficient and safe transport systems, where efficiency is achieved through how a network is managed, and safety is implicitly ensured through compliance with design and operational guidelines. At the risk of oversimplification, success is evidenced by uncongested roads. Road safety managers are often more reactive in their duties, identifying deficiencies of operation that result in crashes, and devising solutions. Success is evidenced by reductions in injuries and fatalities on transport systems.
The operational efficiency of a transport network is primarily measured by mobility metrics like average travel times, delays, and average speeds, whereas safety assessment relies on the count and severity of crashes.
In Australia, the Safe Systems Approach seeks to cultivate a more proactive and holistic approach to road safety. This policy goal requires a shift in focus from retrofitting safety once all the mobility objectives have been met, to maximising mobility within the limits of safe operations. The ability to reliably predict crash risk as a function of operating conditions is a fundamental requirement for this seismic shift in the way transport networks are managed.

How AMAG’s Continuous Safety and Operations Monitoring works?
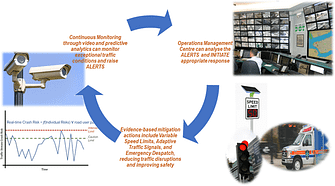
Briefly, the CSO module works by using the continuous video feed from state-of-the-art, ultra high definition, high-dynamic range, edge-enabled cameras supplied by Boulder AI Inc. The real-time risk algorithms combined with cutting edge video analytics enables constant monitoring of crashes, traffic conflicts, road user flows, violations (by direction and turns), and speeds. Using baseline risk and operations, or manually entered control thresholds, alerts are generated when a transport network location undergoes a significant change from baseline operations (after consideration of natural fluctuations by time of day and season). When such a safety or operations deterioration is detected, the CSO platform issues alerts prompting the road user agencies to inspect site operations, despatch emergency response units in case of a collision, and/or to conduct a deep dive diagnostic analysis through the DRM utility of the AMAG SMART platform for long-term safety benefits.
Current practice at Traffic Management Centres (TMCs) requires traffic professionals to manually monitor traffic operations on selected corridors through networks of cameras, with certain traffic feeds triggering alerts. These monitoring activities would be greatly enhanced by applying automated video analytics to monitor traffic conflicts and other risk-related metrics (e.g. speeding, violations). Continuous risk monitoring would enable the ability to monitor traffic risks and risk trends, so that unacceptable and incident-induced congestion could also be avoided. Improved management of Variable Speed Limits and reduced dispatching of emergency vehicles to incidents would be expected as a result.
AMAG’s Continuous Safety and Operations (CSO) module is designed to achieve these objectives. It continuously measures numerous risk-related metrics, including flows, speeds, violations and traffic conflicts. It compares current risk with historic risk to inform current operations and alert operations managers. Moreover, the platform is designed to be scalable, meaning that it can efficiently manage many locations or traffic corridors.
Another significant advantage of video analytics is collecting traffic violations data, which are notoriously difficult to collect. The predictive capabilities of AI-based systems enable monitoring of exceptional road user behaviours as well. For example, a video-based advanced intersection management system can continuously monitor the speed and acceleration profiles of dilemma zone vehicles during amber phases to predict their red-light-running likelihood. If a vehicle is predicted not to clear an intersection by the start of the next phase, an alert can be issued to the traffic controller to extend the all-red phase to allow its safe passage through the intersection. Similarly, only video-based monitoring can monitor pedestrian spatial and temporal violations at pedestrian crossings and wrong-way bicycle riding in an automated fashion. Often these violations are indicative of operational or road user issues that may require targeted treatment.
Finally, computer vision and predictive analytics combined will accelerate our readiness for the deployment of advanced technologies like Adaptive Traffic Signal Safety Systems[3] and self-driving vehicles. Since such technologies are poised to improve both the safety and efficiency of traffic operations significantly, widespread adoption of automated video-based traffic management systems can revolutionise the way we manage transport networks.
[1] Stevanovic, A., Stevanovic, J. and Kergaye, C. 2013. Optimization of traffic signal timings based on surrogate measures of safety. Transportation Research Part C: Emerging Technologies, 32, 159-178.
[2] https://amagroup.io/news/measuring-critical-conflicts-for-crash-prediction/
[3] Tageldin, A., Sayed, T., Zaki, M. H., & Azab, M. (2014). A safety evaluation of an Adaptive Traffic Signal Control system using Computer Vision. Advances in transportation studies.

Ashutosh Arun has 7+ years in safety modelling, analysis & design engineering projects and is a Qualified Road Safety Auditor (2000+ km of roads and highways). He is a researcher in statistical and econometric modelling, the application of machine learning algorithms to problems in traffic engineering and crash modelling. Ashutosh has worked on a Supra Institutional Network Project, “Development of Indian Highway Capacity Manual” and leads the work package aimed at “Capacity Estimation of Multi-lane Interurban Highways”.

Craig Lyon has 24 years of experience as a road safety engineer focused on applied research projects. In 2020 Craig joined Advanced Mobility Analytics Group (AMAG) as General Manager for North America and Senior Road Safety Engineer. Craig has made significant contributions to the state-of-the-art knowledge in road safety found in the AASHTO Highway Safety Manual, including the development of statistical models for predicting crashes, road safety management analysis methods, and the development of Crash Modification Factors (CMFs). Craig is recognized as an expert in the statistical analysis of safety data and is currently a member of the Transportation Research Board Committee on Safety Performance Analysis.

Dr. Simon Washington serves as Co-Founder & CEO for Advanced Mobility Analytics Group (AMAG) and has over 25 years of experience in road safety. He has co-authored more than 100 peer reviewed articles, 3rd edition textbook adopted in 20 + countries, an edited book, and 3 book chapters with focus on road safety. His work has been cited more than 10,000 times. He has served on the faculties of Georgia Tech, University of Queensland, and UC Berkeley. In 2019 he was recognized as the top academic (Field Leader) in Transport across Australia.

